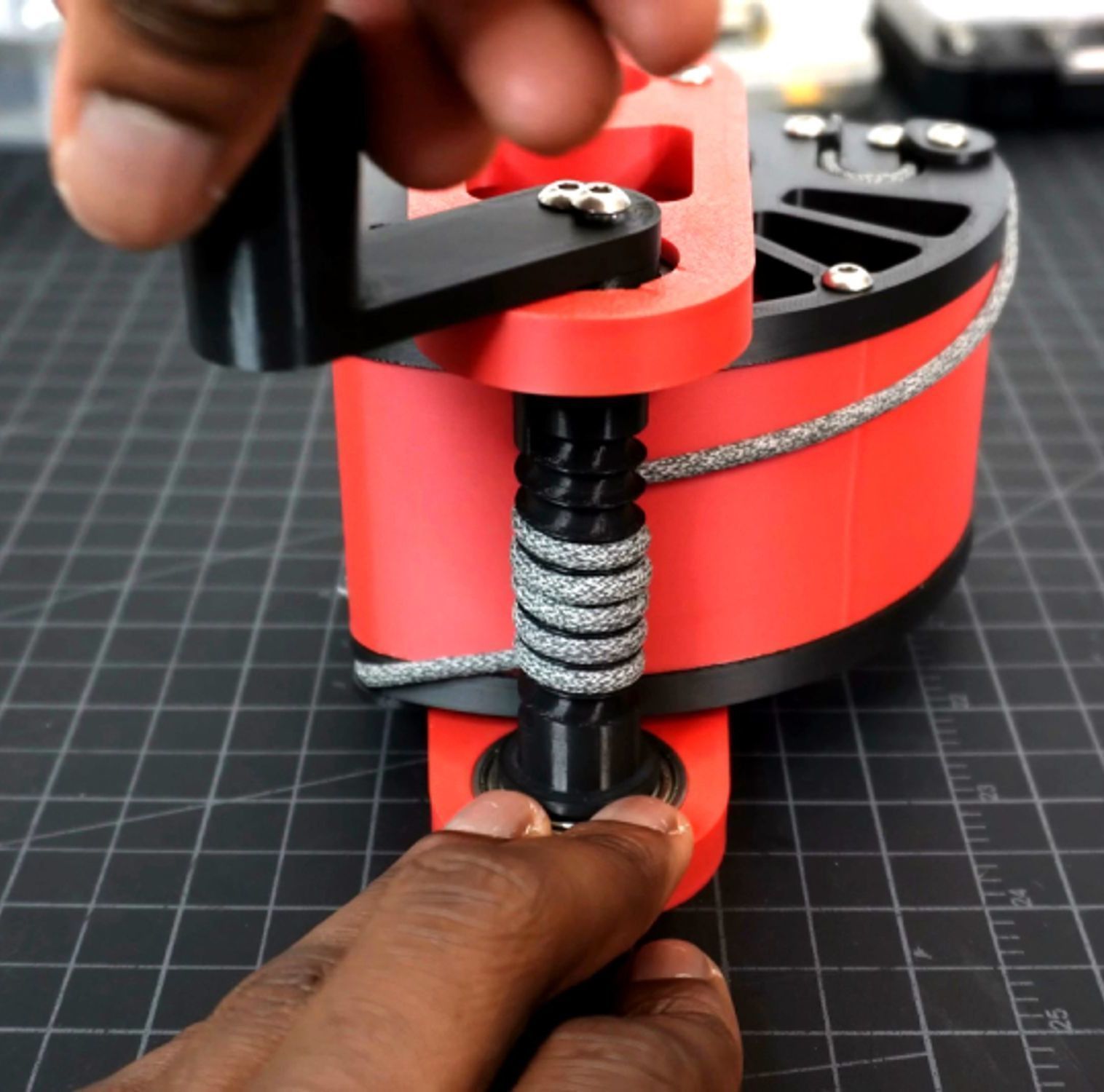
The next stage of a stationary satellite dish is to attach a rotator, a 2 - maybe 3 - axis machine that rotates the satellite dish in any which direction for the purpose of tracking satellites. With these capabilities, one would be able to receive high quality images from satellites in LEO, satellites that orbit close to earth and thus transit close up images of the earth. Additionally, this would unlock the entirety of NASA’s Earth Observing System, a collection of earth observing satellites that collect various types of information, some pictorial, some numerical. These satellites usually orbit in Low Earth Orbit and transmit at around 8GHz, some of the more notables among them being the terra satellite and NOAA’s and NASA JPSS (Joint Polar Satellite System). Practically, what this means for the higher frequency satellites, however, is that one needs sub degree precision in order to actually listen to the narrow frequency that the satellite sends out. Now, to accomplish this, there needs to be a mechanical system that does not have any backlash, meaning that once the mechanics move the dish into place, it must not be able to wiggle at all. There are several ways to achieve this, each with their benefits and downfalls. One way is the Capstan Drive, a rope based gearing system that uses the tension in a rope to transfer rotational energy from one item to another.
Capstan Drive Credits: Aaed Musa
While functionally, it has zero backlash, it is only capable of moving within a certain domain, limiting it to servo like applications, not ideal for a system that expects to be able to rotate in any direction without limitation. Another interesting way is a strain wave gearing mechanism, better known as a harmonic drive. This works on spinning a mid gear by flexing it rotationally with an elliptical center part that very slightly rotates with every internal rotation. This is great because it is capable of harboring high gearing ratios within much smaller areas and is very mechanically simple. Its one major downfall is that it relies on the deformation of a center gear that needs to be connected to a non deforming axle.
Harmonic Drive Credits: Wikipedia
This causes high stress over time and can eventually cause the center gear to shear. Another disadvantage is that this cannot be 3d printed (my way of prototyping/manufacturing parts) as a result, as it would just shear across layer lines. A third and the honestly most appealing system is the cycloidal drive. While they use many parts, cycloidal drives do not rely on any deforming parts, and spin on an infinite domain, and can hold large gear ratios in a significantly small footprint. It also just looks oh so cool, so it has that going for it too.
cycloidal drive!!11!11!1 Credits: Wikipedia
While yes, it might be mechanically complex and have many failure points, it is a very sturdy mechanism that has minimal backlash with heavy loads. So in order to make use of this, I would have to build one that can connect to a tripod, and be able to withstand the weight of all the computing power needed to operate it, just to remove the needs for any slip ring for cables like a usb or coax (good luck trying to get a consumer coax slip ring, trust me, I've tried). While the azimuth rotator might need an infinite domain, the elevation is just conceptually locked to a domain of 180degrees due to the fact that you don't need a satellite dish pointing into the ground. However, we can use this to our advantage, as the capstan drive can only work on a limited domain, but can drive high loads with high precision. Making use of both of these mechanisms, one can successfully overengineer an az/el rotator for tracking LEO satellites. Now you just have to get the radio hardware to be able to listen to 8GHz signals, but thats a discussion for another day.